Graph algorithms can seem intimidating at first but once you understand the fundamental traversal algorithms , patterns and practice few problems , they get much easier.
In this article, we’ll cover the 10 most common Graph algorithms and patterns that appear in coding interviews , explaining how they work, when to use them, how to implement them and LeetCode problems you can practice to get better at them.
1. Depth First Search (DFS)
 Depth First Search (DFS)
Depth First Search (DFS)
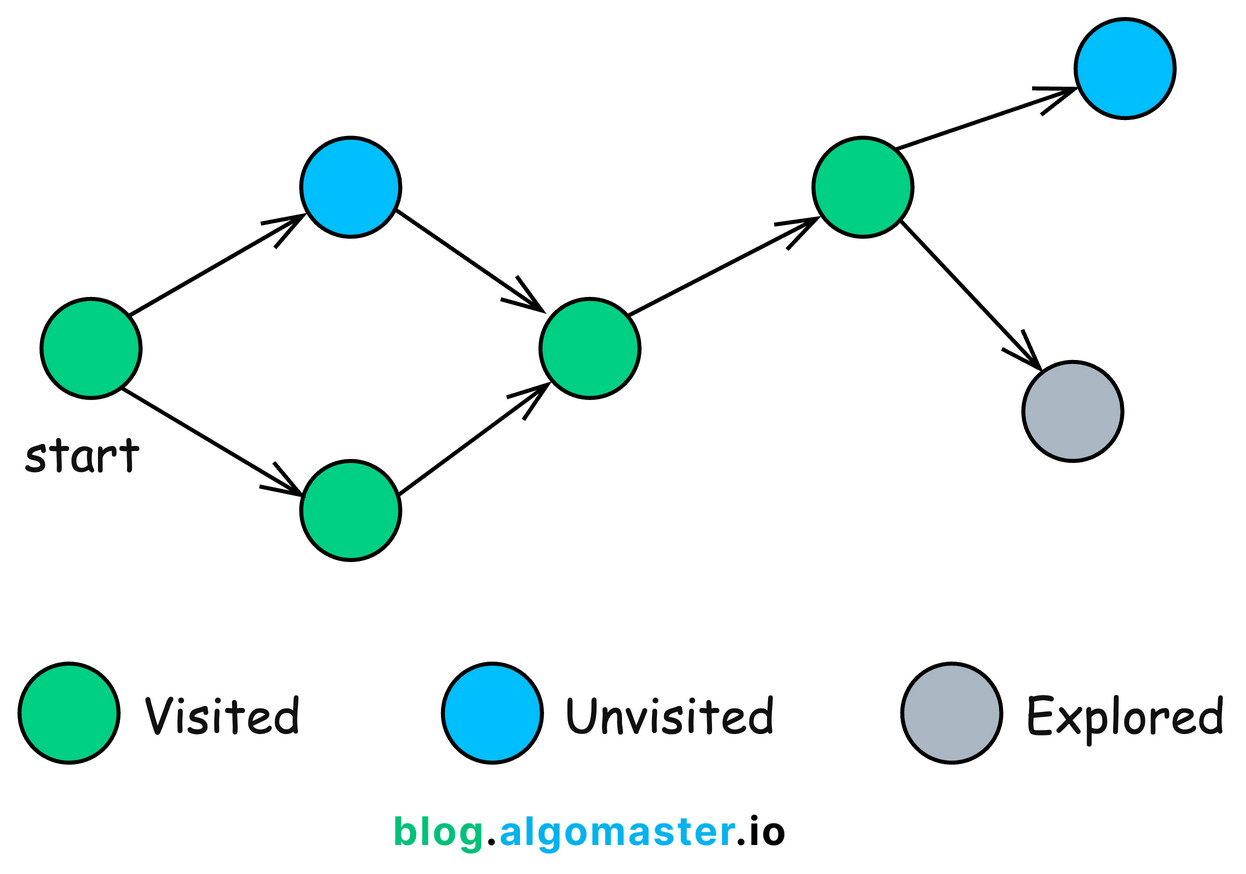
DFS is a fundamental graph traversal algorithm used to explore nodes and edges of a graph systematically.
It starts at a designated root node and explores as far as possible along each branch before backtracking .
DFS is particularly useful in scenarios like:
- Find a path between two nodes.
- Checking if a graph contains any cycles.
- Identifying isolated subgraphs within a larger graph.
- Topological Sorting : Scheduling tasks without violating dependencies.
How DFS Works:
- Start at the Root Node: Mark the starting node as visited.
- Explore Adjacent Nodes: For each neighbor of the current node, do the following:If the neighbor hasn't been visited, recursively perform DFS on it.
- If the neighbor hasn't been visited, recursively perform DFS on it.
- Backtrack: Once all paths from a node have been explored, backtrack to the previous node and continue the process.
- Termination: The algorithm ends when all nodes reachable from the starting node have been visited.
Implementation:
Recursive DFS: Uses system recursion (function call stack) to backtrack.
def dfs_recursive(graph, node, visited=None):
if visited is None:
visited = set()
visited.add(node)
print(f"Visiting {node}")
for neighbor in graph[node]:
if neighbor not in visited:
dfs_recursive(graph, neighbor, visited)
return visited
Explanation:
- Base Case: If visited is not provided, initialize it.
- Visit the Node: Add the current node to the visited set.
- Recursive Call: For each unvisited neighbor, recursively call dfs_recursive.
Iterative DFS: Uses an explicit stack to mimic the function call behavior.
def dfs_iterative(graph, start):
visited = set()
stack = [start]
while stack:
node = stack.pop()
if node not in visited:
visited.add(node)
print(f"Visiting {node}")
# Add neighbors to stack
stack.extend([neighbor for neighbor in graph[node] if neighbor not in visited])
return visited
Explanation:
- Initialize: A visited set to keep track of visited nodes.A stack with the starting node.
- A visited set to keep track of visited nodes.
- A stack with the starting node.
- Process Nodes: Pop a node from the stack.If unvisited, mark as visited and add its neighbors to the stack.
- Pop a node from the stack.
- If unvisited, mark as visited and add its neighbors to the stack.
Time Complexity: O(V + E) , where V is the number of vertices and E is the number of edges. This is because the algorithm visits each vertex and edge once. Space Complexity: O(V), due **** to stack used for recursion (in recursive implementation) or an explicit stack (in iterative implementation).
LeetCode Problems:
- Path Sum II (LeetCode #113)
- Clone Graph (LeetCode #133)
- All Paths From Source to Target (LeetCode #797)
- Time Needed to Inform All Employees (LeetCode #1376)
- Longest Increasing Path in a Matrix (LeetCode #329)
2. Breadth First Search (BFS)
 Breadth First Search (BFS)
Breadth First Search (BFS)
BFS is a fundamental graph traversal algorithm that systematically explores the vertices of a graph level by level .
Starting from a selected node, BFS visits all of its immediate neighbors first before moving on to the neighbors of those neighbors. This ensures that nodes are explored in order of their distance from the starting node.
BFS is particularly useful in scenarios such as:
- Finding the minimal number of edges between two nodes.
- Processing nodes in a hierarchical order, like in tree data structures.
- Finding people within a certain degree of connection in a social network.
How BFS Works:
- Initialization: Create a queue and enqueue the starting node.
- Mark the starting node as visited.
- Traversal Loop: While the queue is not empty:
- Dequeue a node from the front of the queue.
- Visit all unvisited neighbors:Mark each neighbor as visited.Enqueue the neighbor.
- Mark each neighbor as visited.
- Enqueue the neighbor.
- Termination: The algorithm terminates when the queue is empty, meaning all reachable nodes have been visited.
Implementation:
from collections import deque
def bfs(graph, start):
visited = set()
queue = deque([start])
visited.add(start)
while queue:
vertex = queue.popleft()
print(f"Visiting {vertex}")
for neighbor in graph[vertex]:
if neighbor not in visited:
visited.add(neighbor)
queue.append(neighbor)
Time Complexity: O(V + E) , where V is the number of vertices and E is the number of edges. This is because BFS visits each vertex and edge exactly once. Space Complexity: O(V) for the queue and visited set used for traversal.
LeetCode Problems:
- Rotting Oranges (LeetCode #994)
- 01 Matrix (LeetCode #542)
- Open the Lock (LeetCode #752)
- Word Ladder (LeetCode #127)
3. Topological Sort
 Topological Sorting
Topological Sorting
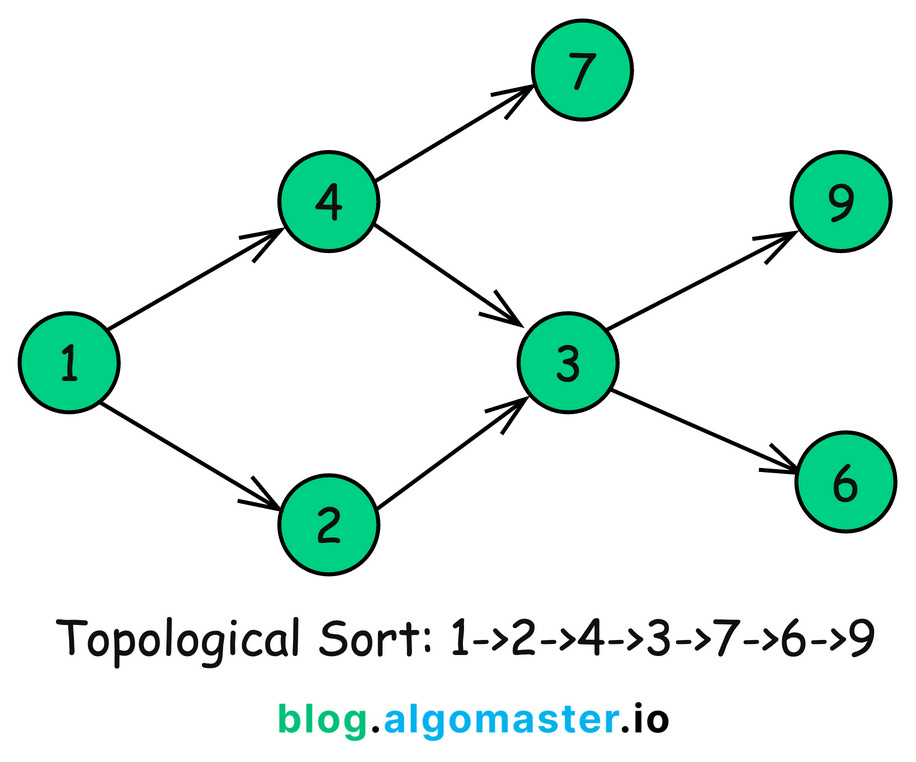
Topological Sort algorithm is used to order the vertices of a Directed Acyclic Graph (DAG) in a linear sequence, such that for every directed edge u → v, vertex u comes before vertex v in the ordering.
Essentially, it arranges the nodes in a sequence where all prerequisites come before the tasks that depend on them.
Topological Sort is particularly useful in scenarios like:
- Determining the order of tasks while respecting dependencies (e.g., course prerequisites, build systems).
- Figuring out the order to install software packages that depend on each other.
- Ordering files or modules so that they can be compiled without errors due to missing dependencies.
There are two common methods to perform a Topological Sort:
1. Depth First Search (DFS) Based Algorithm:
def topological_sort_dfs(graph):
visited = set()
stack = []
def dfs(vertex):
visited.add(vertex)
for neighbor in graph.get(vertex, []):
if neighbor not in visited:
dfs(neighbor)
stack.append(vertex)
for vertex in graph:
if vertex not in visited:
dfs(vertex)
return stack[::-1] # Reverse the stack to get the correct order
Explanation:
- DFS Traversal: Visit each node and recursively explore its neighbors.
- Post-Order Insertion: After visiting all descendants of a node, add it to the stack.
- Result: Reverse the stack to obtain the topological ordering.
2. BFS-Based Topological Sort (Kahn's Algorithm):
from collections import deque
def topological_sort_kahn(graph):
in_degree = {u: 0 for u in graph}
for u in graph:
for v in graph[u]:
in_degree[v] = in_degree.get(v, 0) + 1
queue = deque([u for u in in_degree if in_degree[u] == 0])
topo_order = []
while queue:
u = queue.popleft()
topo_order.append(u)
for v in graph.get(u, []):
in_degree[v] -= 1
if in_degree[v] == 0:
queue.append(v)
if len(topo_order) == len(in_degree):
return topo_order
else:
raise Exception("Graph has at least one cycle")
Explanation:
- Compute In-Degrees: Calculate the number of incoming edges for each node.
- Initialize Queue: Start with nodes that have zero in-degree.
- Process Nodes: Dequeue a node, add it to the topological order.Reduce the in-degree of its neighbors.Enqueue neighbors whose in-degree becomes zero.
- Dequeue a node, add it to the topological order.
- Reduce the in-degree of its neighbors.
- Enqueue neighbors whose in-degree becomes zero.
- Cycle Detection: If the topological order doesn't include all nodes, the graph contains a cycle.
Time Complexity: O(V + E) since each node and edge is processed exactly once. Space Complexity: O(V) for storing the topological order and auxiliary data structures like the visited set or in-degree array.
LeetCode Problems:
- Course Schedule (LeetCode #207)
- Course Schedule II (LeetCode #210)
- Find Eventual Safe States (LeetCode #802)
- Minimum Height Trees (LeetCode #310)
4. Union Find
 Union Find
Union Find
Union Find is a data structure that keeps track of a set of elements partitioned into disjoint (non-overlapping) subsets.
It supports two primary operations:
- Find (Find-Set): Determines which subset a particular element belongs to. This can be used to check if two elements are in the same subset.
- Union: Merges two subsets into a single subset, effectively connecting two elements.
Union Find is especially useful in scenarios like:
- Quickly checking if adding an edge creates a cycle in a graph.
- Building a Minimum Spanning Tree by connecting the smallest edges while avoiding cycles.
- Determining if two nodes are in the same connected component.
- Grouping similar elements together.
How Union Find Works:
The Union Find data structure typically consists of:
- Parent Array ( parent ): An array where parenti holds the parent of element i. Initially, each element is its own parent.
- Rank Array ( rank ): An array that approximates the depth (or height) of the tree representing each set. Used to optimize unions.
Operations:
- Find(x): Finds the representative (root) of the set containing x.Follows parent pointers until reaching a node that is its own parent. Path Compression is used to optimize the time complexity of find operation, by making each node on the path point directly to the root, flattening the structure.
- Finds the representative (root) of the set containing x.
- Follows parent pointers until reaching a node that is its own parent.
- Path Compression is used to optimize the time complexity of find operation, by making each node on the path point directly to the root, flattening the structure.
- Union(x, y): Merges the sets containing x and y.Find the roots of x and y, then make one root the parent of the other. Union by Rank optimization is used where the root of the smaller tree is made a child of the root of the larger tree to keep the tree shallow.
- Merges the sets containing x and y.
- Find the roots of x and y, then make one root the parent of the other.
- Union by Rank optimization is used where the root of the smaller tree is made a child of the root of the larger tree to keep the tree shallow.
Implementation:
class UnionFind:
def __init__(self, size):
self.parent = [i for i in range(size)] # Each node is its own parent initially
self.rank = [0] * size # Rank (depth) of each tree
def find(self, x):
if self.parent[x] != x:
# Path compression: flatten the tree
self.parent[x] = self.find(self.parent[x])
return self.parent[x]
def union(self, x, y):
# Find roots of the sets containing x and y
root_x = self.find(x)
root_y = self.find(y)
if root_x == root_y:
# Already in the same set
return
# Union by rank: attach smaller tree to root of larger tree
if self.rank[root_x] < self.rank[root_y]:
self.parent[root_x] = root_y
elif self.rank[root_y] < self.rank[root_x]:
self.parent[root_y] = root_x
else:
# Ranks are equal; choose one as new root and increment its rank
self.parent[root_y] = root_x
self.rank[root_x] += 1
Time Complexity per Operation:
- Find and Union: Amortized O(α(n)), where α(n) is the inverse Ackermann function, which is nearly constant for all practical purposes.
Space Complexity: O(n), where n is the number of elements, for storing the parent and rank arrays.
LeetCode Problems:
- Redundant Connection (LeetCode #684)
- Accounts Merge (LeetCode #721)
- Minimize Malware Spread (LeetCode #924)
5. Cycle Detection

Cycle Detection involves determining whether a graph contains any cycles—a path where the first and last vertices are the same, and no edges are repeated.
In other words, it's a sequence of vertices starting and ending at the same vertex, with each adjacent pair connected by an edge.
Cycle Detection is particularly important in scenarios such as:
- Detecting deadlocks in operating systems, to detect circular wait conditions.
- Ensuring there are no circular dependencies in package management or build systems.
- Understanding whether a graph is a tree or a cyclic graph.
There are different approaches for detecting cycles in graphs:
Cycle Detection in Undirected Graphs using DFS:
def has_cycle_undirected(graph):
visited = set()
def dfs(vertex, parent):
visited.add(vertex)
for neighbor in graph.get(vertex, []):
if neighbor not in visited:
if dfs(neighbor, vertex):
return True
elif neighbor != parent:
return True # Cycle detected
return False
for vertex in graph:
if vertex not in visited:
if dfs(vertex, None):
return True
return False
Explanation:
- DFS Traversal: Start DFS from unvisited nodes.
- Parent Tracking: Keep track of the parent node to avoid false positives.
- Cycle Detection Condition: If a visited neighbor is not the parent, a cycle is detected.
Cycle Detection in Directed Graphs using DFS:
def has_cycle_directed(graph):
visited = set()
recursion_stack = set()
def dfs(vertex):
visited.add(vertex)
recursion_stack.add(vertex)
for neighbor in graph.get(vertex, []):
if neighbor not in visited:
if dfs(neighbor):
return True
elif neighbor in recursion_stack:
return True # Cycle detected
recursion_stack.remove(vertex)
return False
for vertex in graph:
if vertex not in visited:
if dfs(vertex):
return True
return False
Explanation:
- Visited Set and Recursion Stack: visited tracks all visited nodes.recursion_stack tracks nodes in the current path.
- visited tracks all visited nodes.
- recursion_stack tracks nodes in the current path.
- Cycle Detection Condition: If a neighbor is in the recursion stack, a cycle is detected.
- If a neighbor is in the recursion stack, a cycle is detected.
Cycle Detection using Union-Find (Undirected Graphs):
class UnionFind:
def __init__(self):
self.parent = {}
def find(self, x):
# Path compression
if self.parent.get(x, x) != x:
self.parent[x] = self.find(self.parent[x])
return self.parent.get(x, x)
def union(self, x, y):
root_x = self.find(x)
root_y = self.find(y)
if root_x == root_y:
return False # Cycle detected
self.parent[root_y] = root_x
return True
def has_cycle_union_find(edges):
uf = UnionFind()
for u, v in edges:
if not uf.union(u, v):
return True
return False
Explanation:
- Initialization: Create a UnionFind instance.
- Processing Edges: For each edge, attempt to union the vertices.If union returns False, a cycle is detected.
- For each edge, attempt to union the vertices.
- If union returns False, a cycle is detected.
Time Complexity: O(V + E), since each node and edge is processed at most once. Space Complexity: O(V) for the visited set and recursion stack in DFS.
LeetCode Problems:
6. Connected Components
In the context of undirected graphs , a connected component is a set of vertices where each vertex is connected to at least one other vertex in the same set via some path.
Essentially, it's a maximal group of nodes where every node is reachable from every other node in the same group.
In directed graphs , we refer to strongly connected components (SCCs) , where there is a directed path from each vertex to every other vertex within the same component.
How to Find Connected Components:
We can find connected components using graph traversal algorithms like Depth-First Search (DFS) or Breadth-First Search (BFS) .
The idea is to:
- Initialize:
- Create a visited set to keep track of visited nodes.
- Initialize a components list to store each connected component.
- Traversal:
- For each unvisited node, perform DFS or BFS.
- Mark all reachable nodes from this node as part of the same component.
- Add the component to the components list.
- Repeat:
- Continue the process until all nodes have been visited.
Implementation:
def connected_components(graph):
visited = set()
components = []
def dfs(node, component):
visited.add(node)
component.append(node)
for neighbor in graph.get(node, []):
if neighbor not in visited:
dfs(neighbor, component)
for node in graph:
if node not in visited:
component = []
dfs(node, component)
components.append(component)
return components
Explanation:
- Visited Set: Keeps track of nodes that have been visited to prevent revisiting.
- DFS Function: Recursively explores all neighbors of a node.Adds each visited node to the current component.
- Recursively explores all neighbors of a node.
- Adds each visited node to the current component.
- Main Loop: Iterates over all nodes in the graph.For unvisited nodes, initiates DFS and collects the connected component.
- Iterates over all nodes in the graph.
- For unvisited nodes, initiates DFS and collects the connected component.
Time Complexity: O(V + E) since each node and edge is visited exactly once. Space Complexity: O(V) due to the visited set and the recursion stack (in DFS) or queue (in BFS).
Strongly Connected Components in Directed Graphs:
To find strongly connected components in a directed graph, you can use algorithms like Kosaraju's Algorithm or Tarjan's Algorithm .
Kosaraju's Algorithm Steps:
- First Pass: Perform DFS on the original graph to compute the finishing times of each node.
- Transpose Graph: Reverse the direction of all edges.
- Second Pass: Perform DFS on the transposed graph in the order of decreasing finishing times from the first pass.
- Result: Each DFS traversal in the second pass identifies a strongly connected component.
LeetCode Problems:
7. Bipartite Graphs
 Bipartite Graph
Bipartite Graph
A bipartite graph is a type of graph whose vertices can be divided into two disjoint and independent sets, usually denoted as U and V, such that every edge connects a vertex from U to one in V.
In other words, no edge connects vertices within the same set.
Imagine two groups of people at a party: one group of interviewers and another of candidates . Edges represent interviews between an interviewer and a candidate. Since no interviewer interviews another interviewer and no candidate interviews another candidate, the graph naturally divides into two sets, making it bipartite.
Properties of Bipartite Graphs:
- Two-Colorable: A graph is bipartite if and only if it can be colored using two colors such that no two adjacent vertices have the same color.
- No Odd Cycles: Bipartite graphs do not contain cycles of odd length.
How to Check if a Graph is Bipartite:
We can determine whether a graph is bipartite by attempting to color it using two colors without assigning the same color to adjacent vertices. If successful, the graph is bipartite.
This can be done using:
- Breadth-First Search (BFS): Assign colors level by level.
- Depth-First Search (DFS): Assign colors recursively.
Implementation using BFS
from collections import deque
def is_bipartite(graph):
color = {}
for node in graph:
if node not in color:
queue = deque([node])
color[node] = 0 # Assign first color
while queue:
current = queue.popleft()
for neighbor in graph[current]:
if neighbor not in color:
color[neighbor] = 1 - color[current] # Assign opposite color
queue.append(neighbor)
elif color[neighbor] == color[current]:
return False # Adjacent nodes have the same color
return True
Explanation:
- Initialization: Create a color dictionary to store the color assigned to each node.
- BFS Traversal: For each uncolored node, start BFS.Assign the starting node a color (0 or 1).For each neighbor:If uncolored, assign the opposite color and enqueue.If already colored and has the same color as the current node, the graph is not bipartite.
- Assign the starting node a color (0 or 1).
- For each neighbor:If uncolored, assign the opposite color and enqueue.If already colored and has the same color as the current node, the graph is not bipartite.
- If uncolored, assign the opposite color and enqueue.
- If already colored and has the same color as the current node, the graph is not bipartite.
- Result: If the traversal completes without conflicts, the graph is bipartite.
Time Complexity: O(V + E) since each node and edge is visited exactly once. Space Complexity: O(V) due to the color set and the recursion stack (in DFS) or queue (in BFS).
LeetCode Problems:
- Is Graph Bipartite? (LeetCode #785)
- Possible Bipartition (LeetCode #886)
- Flower Planting With No Adjacent (LeetCode #1042)
8. Flood Fill
Flood Fill is an algorithm that determines and alters the area connected to a given node in a multi-dimensional array.
Starting from a seed point, it finds or fills (or recolors) all connected pixels or cells that have the same color or value.
How Flood Fill Works:
- Starting Point: Begin at the seed pixel (starting coordinates).
- Check the Color: If the color of the current pixel is the target color (the one to be replaced), proceed.
- Replace the Color: Change the color of the current pixel to the new color.
- Recursively Visit Neighbors:
- Move to neighboring pixels (up, down, left, right—or diagonally, depending on implementation).
- Repeat the process for each neighbor that matches the target color.
- Termination: The algorithm ends when all connected pixels of the target color have been processed.
Implementation
Recursive Flood Fill:
def flood_fill_recursive(image, sr, sc, new_color):
rows, cols = len(image), len(image[0])
color_to_replace = image[sr][sc]
if color_to_replace == new_color:
return image
def dfs(r, c):
if (0 <= r < rows and 0 <= c < cols and image[r][c] == color_to_replace):
image[r][c] = new_color
# Explore neighbors: up, down, left, right
dfs(r + 1, c) # Down
dfs(r - 1, c) # Up
dfs(r, c + 1) # Right
dfs(r, c - 1) # Left
dfs(sr, sc)
return image
Explanation:
- Base Case: If the color to replace is the same as the new color, return the image as is.
- DFS Function: Checks bounds and whether the current pixel matches the color to replace.Changes the color of the current pixel.Recursively calls itself on adjacent pixels.
- Checks bounds and whether the current pixel matches the color to replace.
- Changes the color of the current pixel.
- Recursively calls itself on adjacent pixels.
Iterative Flood Fill:
from collections import deque
def flood_fill_iterative(image, sr, sc, new_color):
rows, cols = len(image), len(image[0])
color_to_replace = image[sr][sc]
if color_to_replace == new_color:
return image
queue = deque()
queue.append((sr, sc))
image[sr][sc] = new_color
while queue:
r, c = queue.popleft()
for dr, dc in [(-1, 0), (1, 0), (0, -1), (0, 1)]: # Directions: up, down, left, right
nr, nc = r + dr, c + dc
if (0 <= nr < rows and 0 <= nc < cols and image[nr][nc] == color_to_replace):
image[nr][nc] = new_color
queue.append((nr, nc))
return image
Explanation:
- Initialization: Use a deque as a queue to manage pixels to process.Start by enqueuing the seed pixel.
- Use a deque as a queue to manage pixels to process.
- Start by enqueuing the seed pixel.
- Processing Loop: Dequeue a pixel.For each direction (up, down, left, right), check if the neighbor needs to be filled.If so, change its color and enqueue it.
- Dequeue a pixel.
- For each direction (up, down, left, right), check if the neighbor needs to be filled.
- If so, change its color and enqueue it.
- Termination: The loop ends when there are no more pixels to process.
- The loop ends when there are no more pixels to process.
Time Complexity: O(N), where N is the number of pixels in the area to be filled. Each pixel is visited at most once. Space Complexity: Recursive Implementation: O(N), due to the call stack in recursion. Iterative Implementation: O(N), if using a queue or stack to manage pixels.
LeetCode Problems:
9. Minimum Spanning Tree
 Minimum Spanning Tree (MST)
Minimum Spanning Tree (MST)
An MST is a subset of the edges of a connected, undirected, weighted graph that connects all the vertices together, without any cycles, and with the minimum possible total edge weight.
In simpler terms, it's the cheapest possible way to connect all nodes in a network without any loops.
Key Algorithms for Finding MSTs:
1. Kruskal's Algorithm:
- Builds the MST by adding edges incrementally, starting with the smallest.
- Uses Union Find data structure to detect cycles.
Implementation:
class UnionFind:
def __init__(self, size):
self.parent = [i for i in range(size)]
self.rank = [0] * size
def find(self, x):
if self.parent[x] != x:
# Path compression
self.parent[x] = self.find(self.parent[x])
return self.parent[x]
def union(self, x, y):
root_x = self.find(x)
root_y = self.find(y)
if root_x == root_y:
return False # Cycle detected
# Union by rank
if self.rank[root_x] < self.rank[root_y]:
self.parent[root_x] = root_y
elif self.rank[root_y] < self.rank[root_x]:
self.parent[root_y] = root_x
else:
self.parent[root_y] = root_x
self.rank[root_x] += 1
return True
def kruskal_mst(num_nodes, edges):
# edges is a list of tuples: (weight, node_u, node_v)
uf = UnionFind(num_nodes)
mst = []
total_weight = 0
# Sort edges based on weight
edges.sort(key=lambda x: x[0])
for weight, u, v in edges:
if uf.union(u, v):
mst.append((u, v, weight))
total_weight += weight
print(f"Edge added: ({u}, {v}) with weight {weight}")
else:
print(f"Edge ({u}, {v}) with weight {weight} creates a cycle and is skipped.")
print(f"Total weight of MST: {total_weight}")
return mst
Explanation:
- UnionFind Class: Manages disjoint sets to detect cycles efficiently.
- Manages disjoint sets to detect cycles efficiently.
- Edge Sorting: Edges are sorted by weight to consider the smallest edges first.
- Edges are sorted by weight to consider the smallest edges first.
- Main Loop: Iterates over sorted edges.Attempts to union the sets containing the edge's vertices.If union is successful, the edge is added to the MST.If it would create a cycle, the edge is skipped.
- Iterates over sorted edges.
- Attempts to union the sets containing the edge's vertices.
- If union is successful, the edge is added to the MST.
- If it would create a cycle, the edge is skipped.
Time Complexity: O(E log E) since sorting edges takes O(E log E) and union find operations are nearly constant time Space Complexity: O(V + E), O(V) for storing the parent and rank arrays in union find and O(E) for storing the edges.
2. Prim's Algorithm:
- Starts from an arbitrary node and grows the MST by adding the cheapest edge from the tree to a new vertex.
import heapq
def prim_mst(graph, start=0):
num_nodes = len(graph)
visited = [False] * num_nodes
min_heap = [(0, start, -1)] # (weight, current_node, parent_node)
mst = []
total_weight = 0
while min_heap and len(mst) < num_nodes - 1:
weight, u, parent = heapq.heappop(min_heap)
if not visited[u]:
visited[u] = True
if parent != -1:
mst.append((parent, u, weight))
total_weight += weight
print(f"Edge added: ({parent}, {u}) with weight {weight}")
for v, w in graph[u]:
if not visited[v]:
heapq.heappush(min_heap, (w, v, u))
if len(mst) != num_nodes - 1:
print("Graph is not connected.")
return None
print(f"Total weight of MST: {total_weight}")
return mst
Explanation:
- Initialization: visited array tracks visited nodes.min_heap is a priority queue initialized with the starting node.
- visited array tracks visited nodes.
- min_heap is a priority queue initialized with the starting node.
- Main Loop: While the heap is not empty and the MST is incomplete:Pop the edge with the minimum weight.If the node hasn't been visited:Mark it as visited.Add the edge to the MST (if it's not the starting node).Add all edges from this node to the heap.
- While the heap is not empty and the MST is incomplete:Pop the edge with the minimum weight.If the node hasn't been visited:Mark it as visited.Add the edge to the MST (if it's not the starting node).Add all edges from this node to the heap.
- Pop the edge with the minimum weight.
- If the node hasn't been visited:Mark it as visited.Add the edge to the MST (if it's not the starting node).Add all edges from this node to the heap.
- Mark it as visited.
- Add the edge to the MST (if it's not the starting node).
- Add all edges from this node to the heap.
- Termination: The algorithm ends when all nodes are included in the MST.Checks if the MST spans all nodes (graph is connected).
- The algorithm ends when all nodes are included in the MST.
- Checks if the MST spans all nodes (graph is connected).
Time Complexity: O(E log V) using a priority queue (min-heap). Space Complexity: O(V) for the priority queue and arrays used.
LeetCode Problems:
10. Shortest Path
 Shortest Path
Shortest Path
The Shortest Path problem involves finding the path between two vertices (nodes) in a graph such that the sum of the weights of its constituent edges is minimized.
In simpler terms, it's about finding the most efficient route from a starting point to a destination in a network.
Key Algorithms for Finding Shortest Paths:
1. Dijkstra's Algorithm:
- Finds the shortest paths from a single source vertex to all other vertices in a graph with non-negative edge weights .
- It’a a greedy algorithm that uses a priority queue (min-heap).
import heapq
def dijkstra(graph, start):
# graph: adjacency list where graph[u] = [(v, weight), ...]
distances = {vertex: float('inf') for vertex in graph}
distances[start] = 0
priority_queue = [(0, start)]
while priority_queue:
current_distance, current_vertex = heapq.heappop(priority_queue)
# Skip if we have found a better path already
if current_distance > distances[current_vertex]:
continue
for neighbor, weight in graph[current_vertex]:
distance = current_distance + weight
# If a shorter path to neighbor is found
if distance < distances[neighbor]:
distances[neighbor] = distance
heapq.heappush(priority_queue, (distance, neighbor))
return distances
Explanation:
- Initialization: distances dictionary stores the shortest known distance to each vertex.priority_queue is a min-heap storing (distance, vertex) tuples.
- distances dictionary stores the shortest known distance to each vertex.
- priority_queue is a min-heap storing (distance, vertex) tuples.
- Main Loop: Pop the vertex with the smallest known distance.For each neighbor, calculate the new distance.If the new distance is shorter, update and push onto the heap.
- Pop the vertex with the smallest known distance.
- For each neighbor, calculate the new distance.
- If the new distance is shorter, update and push onto the heap.
- Result: Returns the shortest distances from the start vertex to all other vertices.
- Returns the shortest distances from the start vertex to all other vertices.
Time Complexity: O(V + E log V) using a min-heap (priority queue). Space Complexity: O(V) for storing distances and the priority queue.
2. Bellman-Ford Algorithm:
- Computes shortest paths from a single source vertex to all other vertices, even when the graph has negative edge weights .
- It can detect negative cycles.
def bellman_ford(graph, start):
# graph: list of edges [(u, v, weight), ...]
num_vertices = len({u for edge in graph for u in edge[:2]})
distances = {vertex: float('inf') for edge in graph for vertex in edge[:2]}
distances[start] = 0
# Relax edges repeatedly
for _ in range(num_vertices - 1):
for u, v, weight in graph:
if distances[u] + weight < distances[v]:
distances[v] = distances[u] + weight
# Check for negative-weight cycles
for u, v, weight in graph:
if distances[u] + weight < distances[v]:
raise Exception("Graph contains a negative-weight cycle")
return distances
Explanation:
- Initialization: distances dictionary stores the shortest known distance to each vertex.
- Main Loop: Iterate num_vertices - 1 times, relaxing all edges.
- Negative Cycle Check: A final pass to check for improvements indicates a negative cycle.
- Result: Returns the shortest distances from the start vertex to all other vertices.
Time Complexity: O(V * E) Space Complexity: O(V) for storing distances.
3. Breadth-First Search (BFS):
- Applicable for unweighted graphs or graphs where all edges have the same weight.
- Finds the shortest path by exploring neighbor nodes level by level.
from collections import deque
def bfs_shortest_path(graph, start, target):
visited = set()
queue = deque([(start, [start])]) # Each element is a tuple (node, path_to_node)
visited.add(start)
while queue:
current_node, path = queue.popleft()
if current_node == target:
return path # Shortest path found
for neighbor in graph[current_node]:
if neighbor not in visited:
visited.add(neighbor)
queue.append((neighbor, path + [neighbor]))
return None # Path not found
4. A* (A-Star) Algorithm:
- Used for graphs where you have a heuristic estimate of the distance to the target.
- Commonly used in pathfinding and graph traversal, especially in games and AI applications.
How It Works:
- A* combines features of Dijkstra's Algorithm and Greedy Best-First Search.
- It selects the path that minimizes f(n) = g(n) + h(n), where:g(n) is the actual cost from the start node to the current node n.h(n) is the heuristic estimated cost from n to the goal.
- g(n) is the actual cost from the start node to the current node n.
- h(n) is the heuristic estimated cost from n to the goal.
Implementation:
import heapq
def a_star(graph, start, goal, heuristic):
open_set = []
heapq.heappush(open_set, (0 + heuristic(start, goal), 0, start, [start])) # (f_score, g_score, node, path)
closed_set = set()
while open_set:
f_score, g_score, current_node, path = heapq.heappop(open_set)
if current_node == goal:
return path # Shortest path found
if current_node in closed_set:
continue
closed_set.add(current_node)
for neighbor, weight in graph[current_node]:
if neighbor in closed_set:
continue
tentative_g_score = g_score + weight
tentative_f_score = tentative_g_score + heuristic(neighbor, goal)
heapq.heappush(open_set, (tentative_f_score, tentative_g_score, neighbor, path + [neighbor]))
return None # Path not found
Time Complexity:
- Worst-case: O(b^d), where b is the branching factor (average number of successors per state) and d is the depth of the solution.
- Best-case: O(d), when the heuristic function is perfect and leads directly to the goal.
Space Complexity: O(b^d), as it needs to store all generated nodes in memory.
5. Floyd-Warshall Algorithm:
- Computes shortest paths between all pairs of vertices .
- Suitable for dense graphs with smaller numbers of vertices.
- The algorithm iteratively updates the shortest paths between all pairs of vertices by considering all possible intermediate vertices.
Implementation:
def floyd_warshall(graph):
# Initialize distance and next_node matrices
nodes = list(graph.keys())
dist = {u: {v: float('inf') for v in nodes} for u in nodes}
next_node = {u: {v: None for v in nodes} for u in nodes}
# Initialize distances based on direct edges
for u in nodes:
dist[u][u] = 0
for v, weight in graph[u]:
dist[u][v] = weight
next_node[u][v] = v
# Floyd-Warshall algorithm
for k in nodes:
for i in nodes:
for j in nodes:
if dist[i][k] + dist[k][j] < dist[i][j]:
dist[i][j] = dist[i][k] + dist[k][j]
next_node[i][j] = next_node[i][k]
# Check for negative cycles
for u in nodes:
if dist[u][u] < 0:
raise Exception("Graph contains a negative-weight cycle")
return dist, next_node
Time Complexity: O(V^3) Space Complexity: O(V^2) for storing the distance array.
LeetCode Problems:
- Network Delay Time (LeetCode #743)
- Cheapest Flights Within K Stops (LeetCode #787)
- Path with Maximum Probability (LeetCode #1514)
- Path With Minimum Effort (LeetCode #1631)
Thank you so much for reading. If you found it valuable, consider subscribing for more such content every week. If you have any questions or suggestions, please email me your comments or feel free to improve it.
